最近ついつい「きつねダンス」の動画を見てしまうAID研究センター所長です。
今回は農業機械とISOBUSのベースにもなっているCAN通信の関係について考えてみたいと思います。
まずはモールス信号の話から
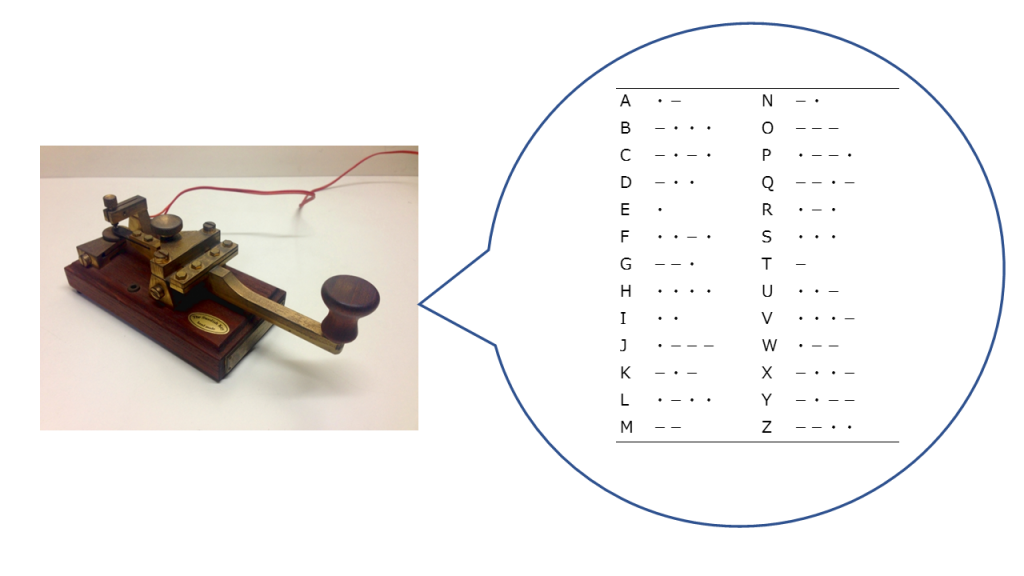
突然ですが、「モールス信号」という言葉を聞いたことがありますか?
モールス信号はアメリカ合衆国のモールス氏が1837年に開発した短点(・)と長点(-)を組み合わせて、アルファベット・数字・記号などを表現する方法です。アマチュア無線の世界では資格試験の試験項目にもなっています。
モールス信号は文字以外にも、「長点1つは短点3つ分の長さに相当し、各点の間は短点1つ分の間隔をあける」、「文字間隔は短点3つ分、語間隔は短点7つ分あけて区別する」など相手方とのコミュニケーションを円滑に行うためのルールが決められており、このような考え方はCAN通信にも引き継がれています。
シリアル通信のルーツはモールス信号
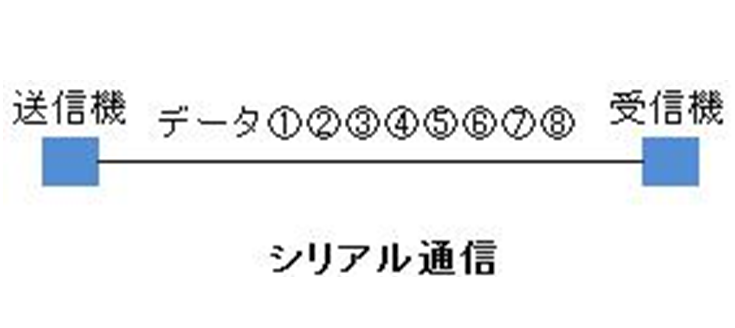
シリアル通信(シリアルとは「直列」という意味)は「回転すし」のレーンのようにデータを連続して流す通信方法で、モールス信号がルーツとされています。
シリアル通信では短点(・)と長点(-)は用いられていませんが、その代わり「0」と「1」を組み合わせて、文字や数字などのデータを流しています。
CAN通信は電位差を利用したシリアル通信
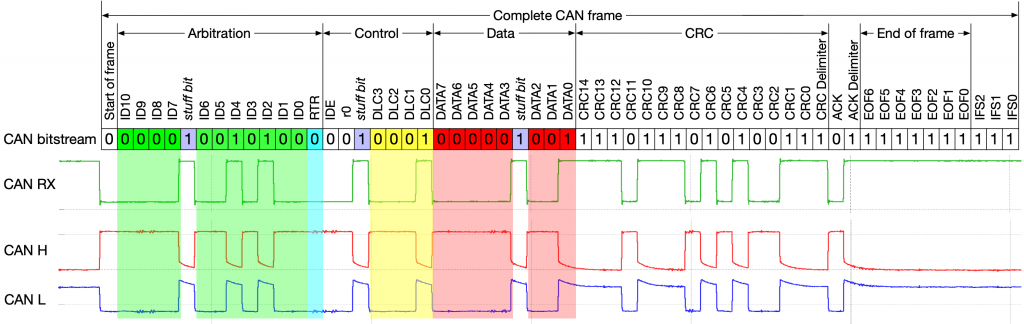
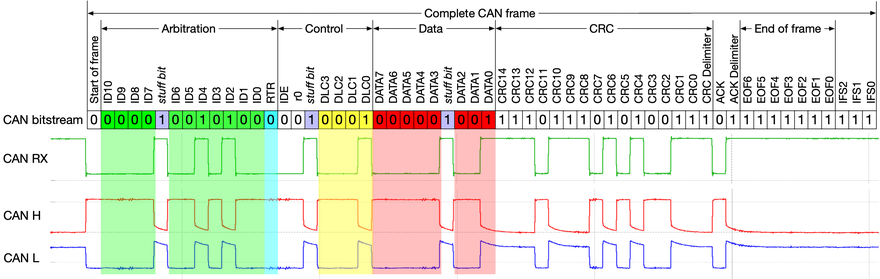
CAN通信はシリアル通信の一種で、CANHとCANLの電位差がある場合は「0」、ない場合は「1」を示すルールになっています。また通信内容を示すID番号や通信エラーをチェックするデータ、モールス信号と同じように異なるデータ間の区切りなどについてルールが定められており、「通信プロトコル」と呼ばれています。
CAN通信は電位差を利用しているため、静電気などの外部のノイズに影響されにくく、自動車内部のデータ通信によく用いられています。
農業機械におけるCAN通信の系譜
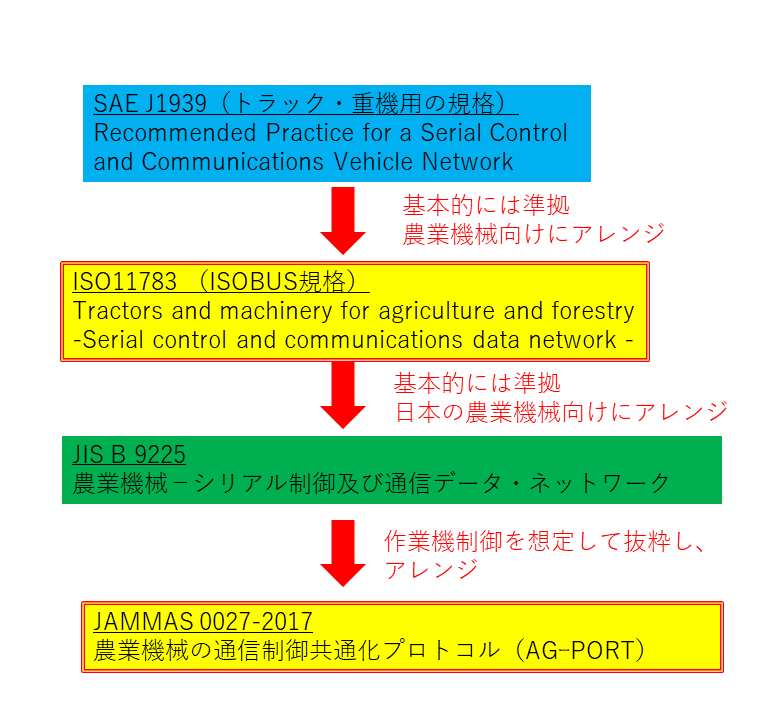
農業機械で用いられているCAN通信は、米国自動車技術者協会(SAE)が、トラック・バス・建設用重機のディーゼルエンジン診断用に制定した規格「SAE J1939」が原点となります。
その後、国際標準化機構(ISO)がSAE J1939との整合性を図りながら農業機械・林業機械向けのCAN通信規格「ISO11783」を制定しました。このISO11783が、最近話題となっているISOBUSの規格となります。
またISOの動向を受けて、日本国内においても国内の農業機械向けのCAN通信規格「JIS B 9225」が制定されました。
さらにJIS規格をもとにして日本農業機械工業会が独自規格の「JAMMAS 0027-2017 農業機械の通信制御共通化プロトコル(AGーPORT)」を制定しました。このAG-PORTは近年販売されている国産トラクタに標準装備されていることが多く、施肥機の速度連動機能を利用する時などに用いられています。
CAN通信によるトラクタ、作業機の制御の流れ
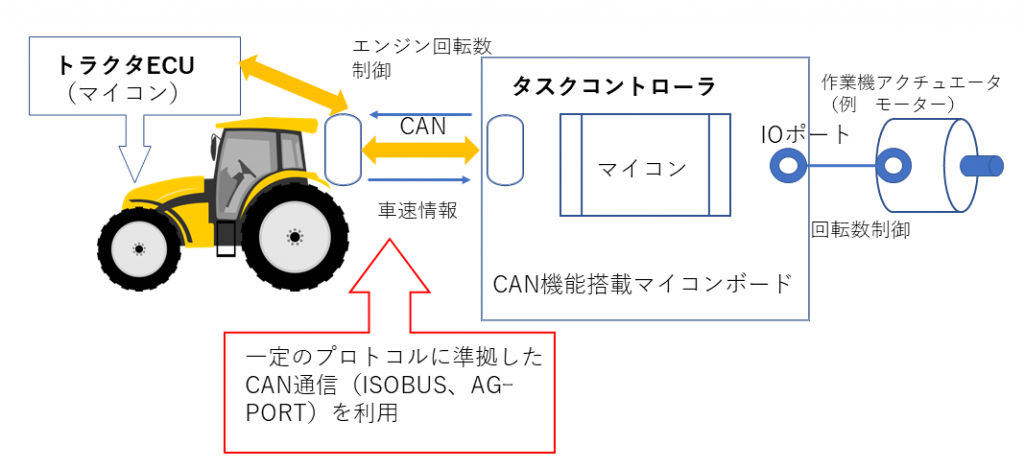
現在トラクタと作業機の制御を行う場合にはISOBUSもしくはAGーPORTが用いられてます。
具体的にはトラクタ側に用意されたマイコン「トラクタICU」と作業機側に用意されたマイコン「タスクコントローラ」のデータのやり取りをCAN通信で行っうことになります。
このため、制御システムを稼働させるためにはISOBUSやAG-PORTでの接続以外に、センサーのデータを読み込み、アクチュエータや場合によってはトラクタECUに指示を出すタスクコントローラが実装されている必要があります。
このタスクコントローラの開発が、今後の大きな課題となっています。



{kind=link}